Multi-agent Control of Simulated Humanoid Robot iCub
Matus Kopernicky has ported Agent-Space architecture into simulator of humanoid robot iCub in 2015.
As a demo he has developed control of iCub head and eyes for following a ball which can be positioned by user.
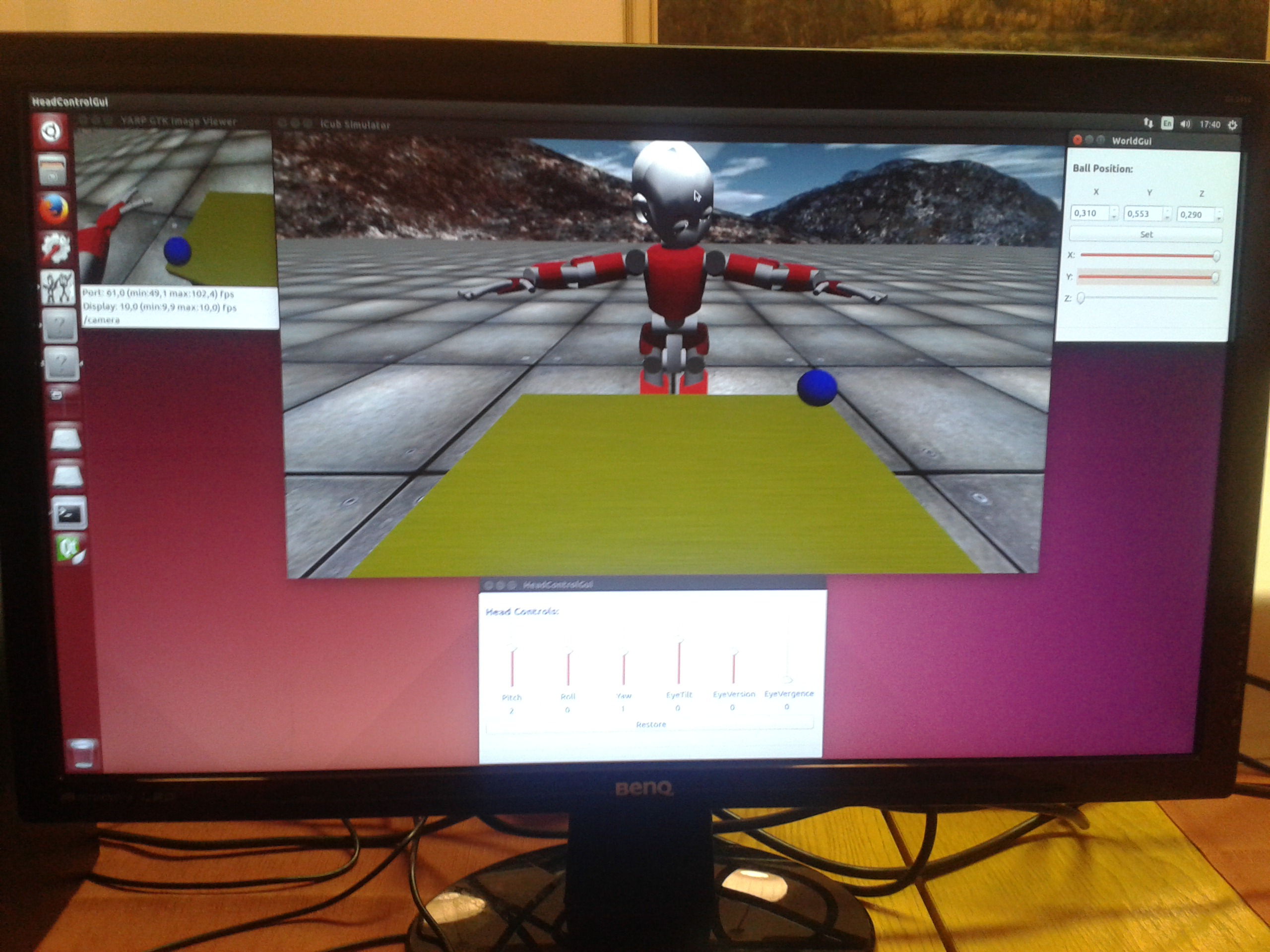
The control is provided by two sets of agents: four agents control head and five agents control eyes.
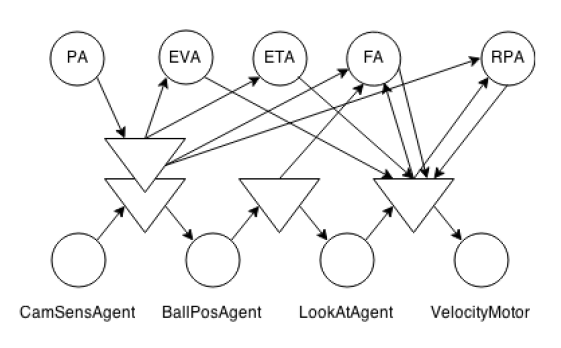
Thus the control emerges from mutual interaction of agents running in parallel.
The software and can be downloaded here
Virtual machine containing installed Ubuntu OS, iCub simulator and ported agent-space architecture can be downloaded here